Sistem Pengiriman Drone Semi-Otonom dengan Integrasi Cloud Real-Time
Sistem pengiriman drone semi-otonom yang mengintegrasikan Mission Planner dengan infrastruktur cloud untuk pemantauan real-time dan operasional logistik yang skalabel.
Dirancang dengan fokus pada integrasi telemetri real-time, arsitektur kontrol berbasis cloud, dan inovasi berbasis riset yang divalidasi melalui publikasi internasional IEEE.
Riset & Publikasi
Proyek ini telah dipublikasikan secara resmi dalam konferensi internasional IEEE, menunjukkan kontribusi akademis dan implementasi praktis dalam sistem logistik berbasis drone.
Enhancing Mission Planner with Real-Time Cloud Integration for Semi-Autonomous Drone-Based Logistics
Ikhtisar Visual
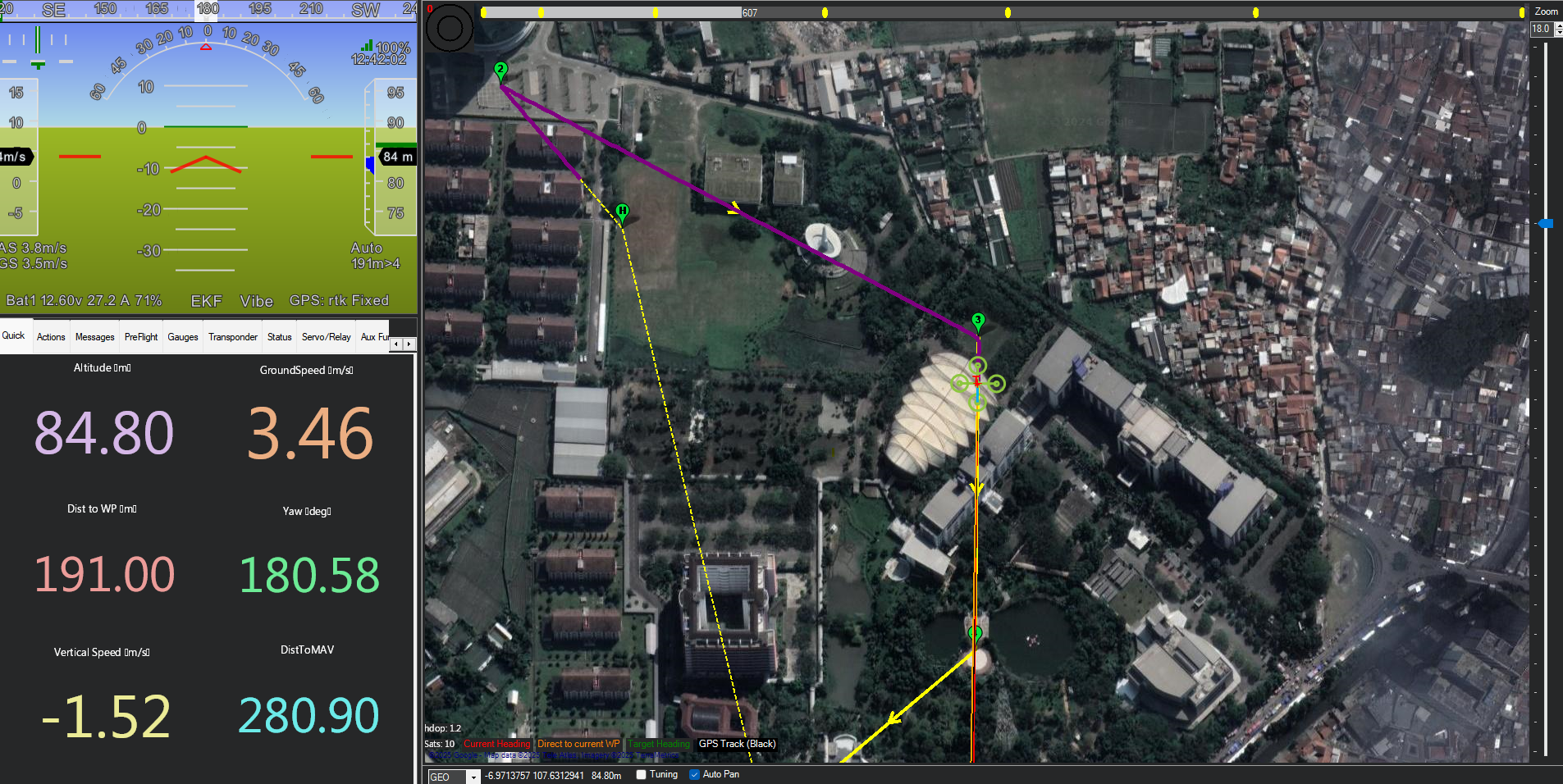
Tampilan komprehensif antarmuka sistem dan operasional drone, termasuk pelacakan real-time, manajemen pesanan, dan pemantauan pengiriman.




01Masalah
Sistem pengiriman drone tradisional seringkali terkendala oleh operasional manual dan kurangnya integrasi dengan platform berbasis cloud. Batasan ini mengurangi skalabilitas, memperlambat pengambilan keputusan, dan membatasi visibilitas operasional real-time.
- Kurangnya integrasi real-time antara telemetri drone dan sistem terpusat
- Ketergantungan tinggi pada operasional drone manual
- Tidak adanya sistem terpadu untuk memantau dan mengelola pengiriman
- Otomasi yang terbatas pada alur kerja pengiriman
- Absennya mekanisme verifikasi pengiriman yang handal
02Solusi
Arsitektur hybrid yang digunakan menjembatani Mission Planner dengan basis data cloud real-time, memungkinkan komunikasi dua arah antara drone dan dashboard.
- Streaming telemetri real-time menggunakan Firebase
- Eksekusi perintah berbasis event dari cloud ke drone
- Arsitektur skrip ganda (Mission Planner + jembatan cloud Python)
- Integrasi ringan tanpa memodifikasi inti Mission Planner
- Logika geofencing untuk validasi pengiriman otomatis
03Dampak
Sistem ini menyediakan implementasi praktis logistik drone semi-otonom, yang divalidasi melalui pengujian sistem dan publikasi akademik.
- Pemantauan dan kontrol real-time pengiriman drone
- Alur kerja pengiriman otomatis dengan intervensi manusia minimal
- Peningkatan efisiensi dalam operasional logistik
- Kontribusi riset yang dipublikasikan dalam konferensi internasional IEEE
- Menunjukkan skalabilitas untuk sistem logistik cerdas di masa depan
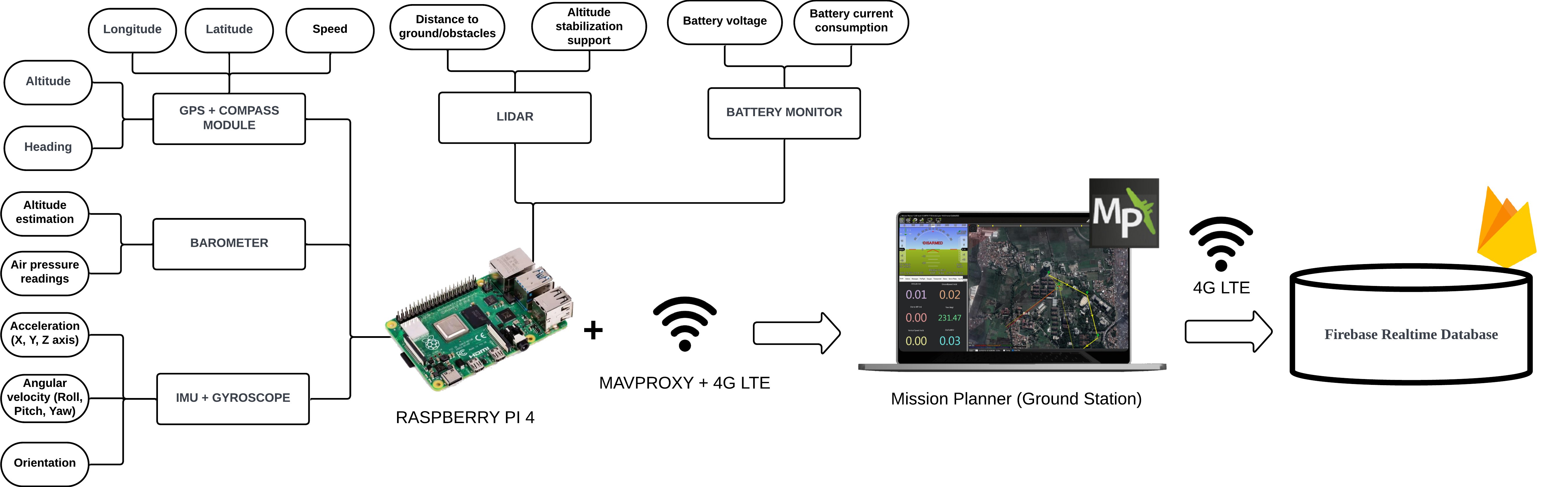
Sistem Alur Kerja
Alur kerja terintegrasi antara sistem drone, basis data cloud, dan dashboard manajemen.
Fitur Utama
Integrasi Telemetri Real-Time
Streaming data telemetri drone secara terus-menerus ke basis data cloud untuk pemantauan langsung
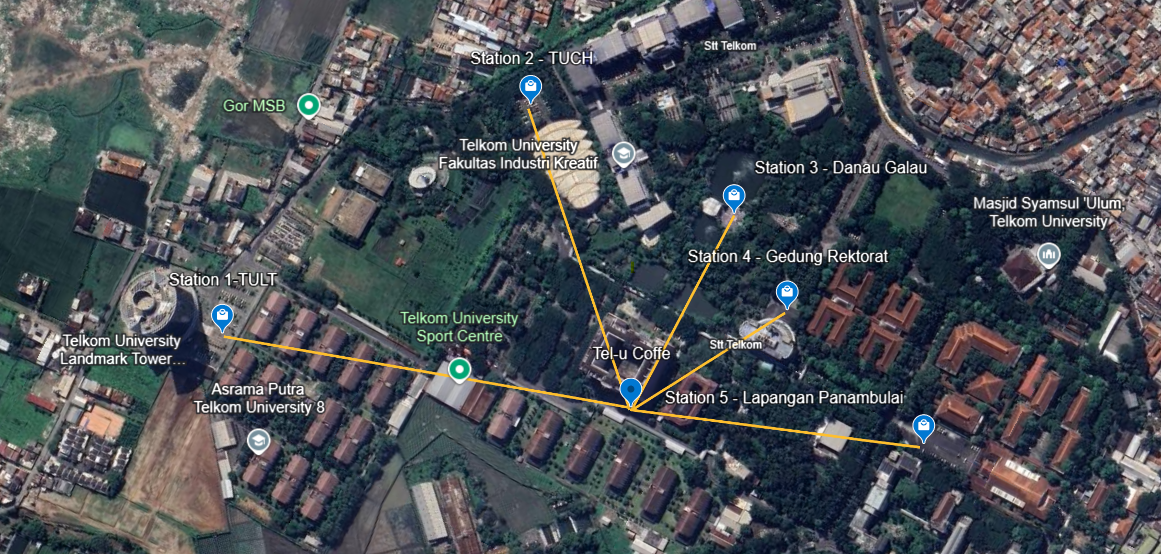
Sistem Pengiriman Semi-Otonom
Drone mengeksekusi alur kerja pengiriman secara otomatis berdasarkan perintah yang dipicu sistem
Validasi Berbasis Geofencing
Memastikan deteksi penyelesaian pengiriman yang akurat menggunakan ambang batas spasial dan ketinggian
Kontrol Perintah Berbasis Cloud
Memungkinkan eksekusi perintah jarak jauh dari dashboard ke drone secara real-time
Dashboard Pemantauan Terpusat
Menyediakan visibilitas operasional dan kontrol penuh dalam satu antarmuka
Teknologi yang Digunakan
Konteks Proyek
Proyek ini dikembangkan sebagai bagian dari inisiatif riset akademik yang berfokus pada integrasi cloud real-time dalam sistem logistik berbasis drone. Riset ini berkontribusi pada kemajuan operasional drone semi-otonom dengan menggabungkan sistem kontrol darat tradisional dengan arsitektur berbasis cloud modern.
Hasilnya menunjukkan pendekatan yang skalabel dan praktis untuk mengintegrasikan Mission Planner dengan basis data real-time, menjembatani celah antara kontrol drone konvensional dan sistem logistik cerdas.
Siap membangun sesuatu yang luar biasa?
Mari diskusikan bagaimana kita dapat menerjemahkan visi Anda menjadi produk digital berkinerja tinggi yang memberikan hasil.